ROS2 + CARLA autonomous stack, built from scratch.
Real module architecture: perception, localization, navigation. No monolithic glue code. Every package has a defined boundary.
Two projects, one direction
ROS2 + CARLA Autonomous Stack
First Programs
Foundational coding work in C and Python. Early experiments that established the systems-level thinking carried into the autonomous stack.
Autonomous driving stack integrating ROS2 Jazzy and the CARLA bridge. Custom package my_autonomous_stack handles perception, localization, and navigation as isolated modules.
ROS2 Jazzy setup · CARLA bridge configured · custom package architecture · sensor pipeline in progress.
Git · Linux · VS Code · low-level fundamentals.
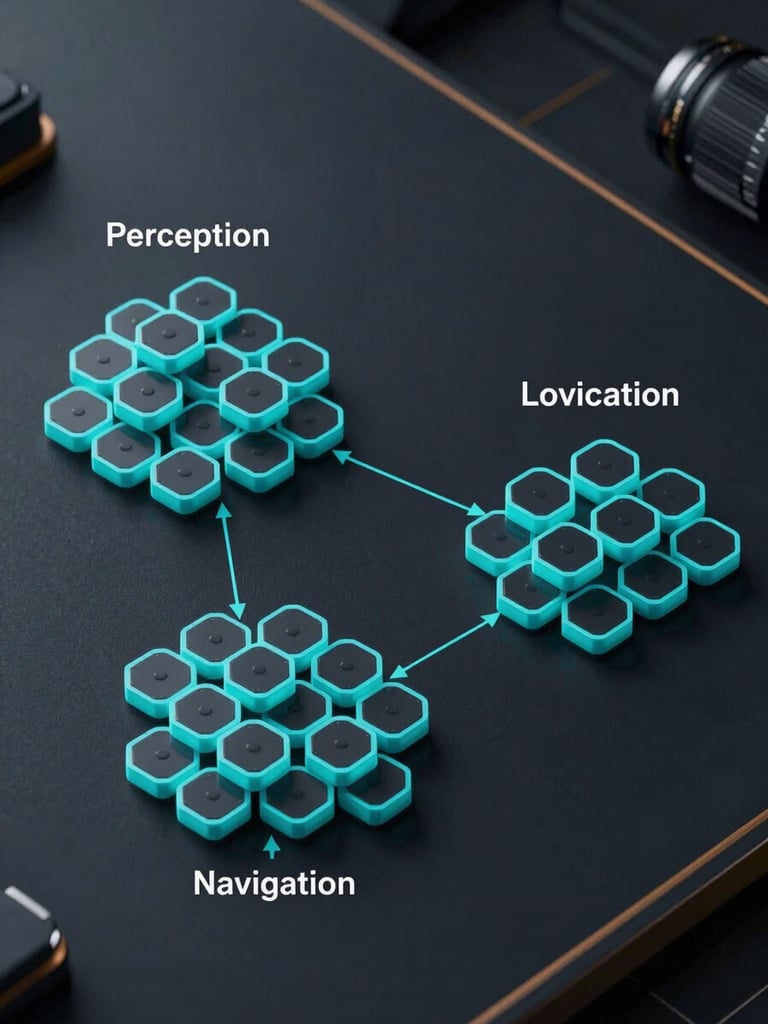
Each module does one thing
Perception ingests sensor data and outputs object detections. Localization maps position against the CARLA environment. Navigation consumes both and issues drive commands.
All three communicate over typed ROS2 topics. Swapping one module doesn't touch the others. That's the architecture constraint that makes the stack testable.
Roadmap: what ships next
Camera subscriber → LiDAR integration → lane detection → object detection → localization → navigation. Each milestone gates the next. No step is skipped.